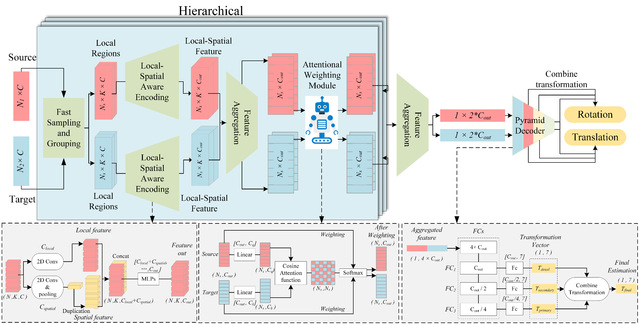
深度实时配准网络(DDRNet)结构图
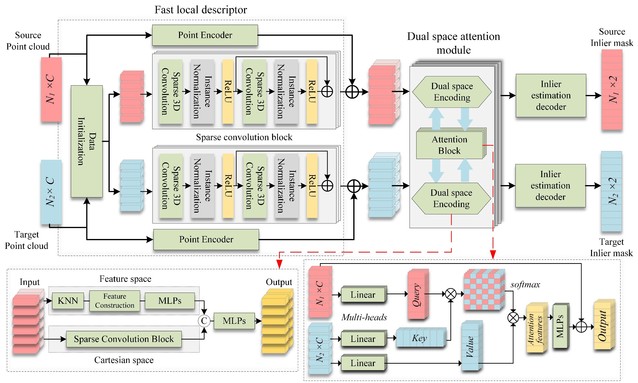
点云深度滤波网络(Fore-Net)结构图
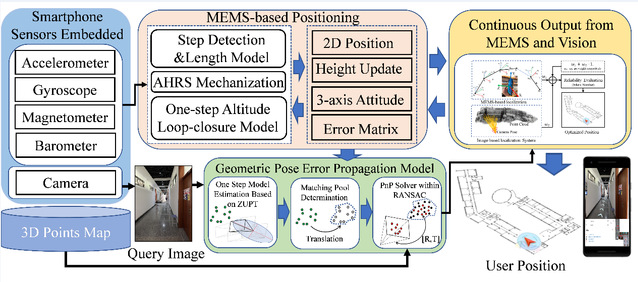
基于移动端的多模态信息视觉定位

团队参与的国家重点研发计划“室内混合智能定位与室内GIS技术”项目冬奥场馆示范
近期,遥感与空间信息领域顶级期刊ISPRS Journal of Photogrammetry and Remote sensing(JCR一区,中科院Top期刊,2021年影响因子为8.979)连续发表环境与测绘学院陈国良教授课题组在视觉与空间数据智能处理方向的系列研究成果。
其中,“DDRNet: Fast point cloud registration network for large-scale scenes”一文面向海量点云数据配准问题,提出了一个实时化的点云配准网络。该网络不仅能够为数据量较大的场景点云提供实时准确的良好配准结果,且能在低场景重叠度、点云噪声及点云稀疏性等因素的影响下保持鲁棒。研究结果对自动驾驶、机器人自主导航等领域具有一定的应用价值与意义。该论文以中国矿业大学为第一单位,张正华博士生为第一作者,陈国良教授为通讯作者,束明聪博士生、王轩硕士生为共同作者。
“Fore-Net: Efficient inlier estimation network for large-scale indoor scenario”一文面向复杂室内空间环境对点云数据质量的影响,提出了一个实时化的点云滤波网络。该网络不仅可以有效优化原始点云的数据质量,且能够在点云噪声与点云稀疏性等因素的影响下保持算法的稳健,作为配准等后续任务的前置滤波模块可显著增强算法的性能,具有一定的场景泛化能力。论文以中国矿业大学为第一单位,张正华博士生为第一作者,陈国良教授为通讯作者,束明聪博士生、王轩硕士生为共同作者。
“Efficient image-based indoor localization with MEMS aid on the mobile device”一文针对室内大场景下的移动端视觉定位多模态信息耦合问题,提出一种基于内置惯性单元辅助的视觉信息匹配模型,用于实现2D视觉特征与先验3D点云特征的精准匹配,提高异源视觉特征匹配率,可为移动端的AR/VR导航定位技术提供新思路。该论文以中国矿业大学为第一单位,束明聪博士生为第一作者,陈国良教授为通讯作者,张正华博士生为共同作者。
上述研究工作得到国家重点研发计划“室内混合智能定位与室内GIS技术”项目、国家自然科学基金项目、中国矿业大学重大专项培育项目等资助,课题组部分成果应用于张家口雪如意冬奥场馆,助力赛事期间人员与设备的调度与应急保障等服务。
新闻来源:环境与测绘学院 张正华摄影:张正华 束明聪责任编辑:李秀审核:刘尧



